Sometimes it is necessary to deactivate the NAO robot's safety features. Follow these instructions if deactivating fall manager is necessary for your project.
Even with Fall Manager enabled, we recommend catching the NAO robot whenever possible.
Prerequisites:
Download PuTTY if you are using Windows (with Mac OS and Linux you can directly use a terminal) http://www.putty.org/
Download the app "Robot Settings". Download it here.
Procedure:
1. Boot up the NAO robot. Open Robot Settings and choose your NAO from the list.
2. In "Settings" Choose the setting labeled "Authorize Deactivation of Safety Reflexes"
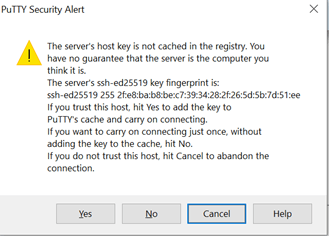
3. Open PuTTY, and enter the NAO's IP address in the field "Host Name (or IP address). Click "Open"
Click on “Yes” in the subsequent pop-up window.
You will be prompted to enter username and password. The default for both are nao
Please note the password does not display the text as you type and appears blank.
4. Enter this command:
qicli call ALMotion.setFallManagerEnabled 0
Need Help?
Please fill out the following form and we will contact you soon to guide you and help you through your problem!