



Syamimi Shamsuddina, b*, Hanafiah Yussofb, Luthffi Idzhar Ismailb, Salina Mohamedc,
Fazah Akhtar Hanapiahc and Nur Ismarrubie Zaharid
aFaculty of Manufacturing Engineering, Universiti Teknikal Malaysia Melaka, Hang Tuah Jaya, 76100 Durian Tunggal, Melaka, Malaysia.
bCOE for Humanoid Robots & Bio-sensing (HuRoBs), Fac. of Mechanical Engineering, Universiti Teknologi MARA (UiTM) Shah Alam, 40450, Malaysia
cFaculty of Medicine, Universiti Teknologi MARA (UiTM) Shah Alam, 40450, Malaysia
dDepartment of Mechanical and Manufacturing, Faculty of Engineering, Universiti Putra Malaysia, Serdang 43400, Malaysia
* Corresponding author. Syamimi Shamsuddin Tel.: +60 3 5543 5161 ; fax: +60 3 5543 5160. E-mail address: syamimi@ieee.org
Abstract: This report presents the findings from our pilot study on the initial behavior of autistic children of moderately impaired intelligence when exposed to simple human-robot interaction (HRI) modules executed by a humanoid robot NAO. All 5 children have been specifically assessed using the Autism Diagnostic Observation Schedule (ADOS) and their diagnosis is classified as autistic disorder. We hypothesize that NAO’s human-like appearance, its capability to blink its eyes, speak and play music; coupled with the simplicity of the HRI modules will be able to entice the children’s interest to engage in communication. Hence, this would significantly reduce the children’s autistic characteristics in communication behavior compared to the usual class setting.
In this study, the principal result shows that 4 out of the 5 children exhibited a decrease of autistic behavior (in communication sub-scale) when the robot is executing HRI modules during the single session of child-robot interaction. This promising outcome indicates that the NAO robot were able to attract the children’s attention, keep each child engaged with the robot during interaction and hence give positive impact to the children’s communication behavior. Relating this to the children’s FSIQ, it can be deducted that autistic children with FSIQ of moderately impaired (from 40-54) are receptive to robot- based intervention. This is again showed by the lower autistic traits observed during the HRI modules compared to in-class setting.
Overall, this research suggests that autistic children of moderately impaired intelligence show good response to robot-based intervention. This finding is crucial to form a solid foundation and proof on the positive utilization of the humanoid robot NAO for the children affected by autism.
1. Introduction
Understanding human intelligence has been a major interest amongst psychologists for centuries [1]. Intelligence is generally the capacity to learn by acquiring and applying knowledge. To date, intelligent quotient (IQ) scores have become an important tool in the selection and placement of individuals and groups in the psychoeducational arena. For children with autism, there has been a long established view that up to 70% of individuals affected by this neuro-developmental disorder to have an intellectual disability defined by an IQ of less than 70 [2]. Nevertheless, deficits in intelligence and behavior must not be seen as a hindrance for these children to lead the lives of normal people.
Autistic disorder is one of the five types of Pervasive Developmental Disorders (PDDs) also known as Autism Spectrum Disorders as defined by the Diagnostic and Statistical Manual of Mental Disorders: Fourth Edition (DSM-IV) [3]. To be diagnosed with autism, a child needs to meet all three criteria which are the qualitative impairment in social interaction, communication and restricted, stereotyped patterns of behavior. These 3 traits are also known as the ‘triad of impairments’ as visualized in Figure 1. Autism is an umbrella term for a wide spectrum of disorders. The characteristics of autism and the degree of the severity experienced by each individual vary significantly from one to another. It is a life-long disability caused by abnormalities of brain development; usually identified within the first 3 years of a child’s life.
The association between the intelligence with autistic behaviour [4] is important to determine the outcome of early behavioural intervention for autistic children [5]. Increases in IQ level and adaptive functioning have been mentioned in [6] where IQ level assumes the function as an indicator on the effectiveness of a particular treatment for autism. Early intervention plays a crucial role [5] as the right treatment can help these disabled children to improve and even recover in the latter part of their lives.
Children with autism have been known to respond more to machines (like computers and robots) than they do to normal people. Robots also comply with the need for repetitive actions and stable environment during the rehabilitation process of people, especially children with autism [7]. A robotic mediator has the sanguine role to reduce stress and difficulties often faced by autistic children during interaction. However, it should be clarified here that the robot’s function is not to replace the roles of therapists but more like an ‘attracting agent’ to keep the autistic child engaged and focused during therapy. In addition, the robot itself is much simpler in appearance compared to real life objects, its behaviour can be custom-made to suit different scenarios and it has the capacity to offer expected and simpler interaction with the autistic children. Thus, these factors make robots the ideal medium to be used in autism therapy.
Communication deficit in autism manifests itself through the inability to create and sustain appropriate conversation, use of repetitive language and problems in using spoken language. Autistic children have also been known to have difficulty in developing joint attention. Joint attention is simply a child’s ability to share interest in objects/events with another person. While joint attention occurs naturally in normal children, the process of developing this skill need to be taught to autistic children [8]. Perhaps one of the most prominent studies that proposes the use of robots for communication care for children with autism is by Kozima et al in 2005 using the interactive robot Keepon [9]. Keepon’s simple appearance and expectable responses had given the autistic children a lively and calm mood which then expanded in interpersonal communication. As children with autism are more likely to communicate with inanimate, non-human entity; robots pose a huge potential to help these children to scaffold their communication skills.
At the Center for Humanoid Robots and Bio-sensing (HuRoBs) in Universiti Teknologi MARA (UiTM), our research motivation lies in our determined goal to contribute to a group of community that suffers from autism. Our multi- disciplinary team comprises of engineering researchers, therapists and also experienced clinicians that work together for the same purpose. We strongly believe that the application of engineering and medical knowledge, coupled with the motivation to help these people with special needs; breakthroughs can be made and accomplished. To achieve this, collaboration with The National Autism Society of Malaysia (NASOM) is forged to engage their students and facilities in this research.
2. The experimental set-up and assessment tools
A humanoid is a robot with an anthropomorphic physical shape. In light of autism intervention, various shapes of robots have been used and explored. Undeniably, the robot’s physical appearance most likely will affect its achievement in clinical applications [10]. However, in our robot-based intervention program, we are positive that a robot in human form holds greater potential to train the children with autism with interaction and behavioral skills. The humanoid shall act as the ‘pull- factor’ to engage and hold the children’s interest during therapy sessions. Also, the utilization of a robot in human form creates possibilities in teaching skills generalization to children with autism [10].
For most children affected with autism, the complexity of emotions expressed by normal persons may be the reason why they experience difficulty understanding gestures or facial expressions, resulting with them shying away from friends and the world around them. As NAO possess simpler features compared to real humans, it will be more approachable and appealing to these children. In addition, the humanoid robot NAO is also one of the most advanced and commercially available humanoid, providing ease of programming to support HRI architecture for the intervention of autistic children.
The pilot experiment had been carried out in a common area at a NASOM centre that caters specifically for children with autism. The set-up is shown in Figure 1. NAO will be pre-programmed to carry out the simple HRI modules in autonomous mode. Detailed explanation on our modules and set-up has been presented in our previous work in [11].
Movements and sounds during the child-robot were recorded via 2 external HD video cameras and 1 mini camera positioned on NAO’s body. NAO is programmed to be in static standing position, facing the child throughout the interaction. The interaction begins with the simplest module of NAO in static mode for 45-seconds, then doing head-turn, eyes blinking, talking, moving its arms, playing nursery rhymes combined with eyes blinking and finally ends with NAO playing the ‘ABC’ song combined with arm movement.
The total duration of the HRI modules are 14 minutes and 30 seconds; excluding the 30-seconds break in between the modules. Each child will experience the modules only once. The average duration for each module is 2.9 minutes.

Fig. 1. Experimental set up with 2 external HD video cameras and the humanoid robot NAO placed on a table to be facing the child
To assess the children’s autistic characteristics, our team utilizes a behavior score sheet that is based on the Gilliam Autism Rating Scale-Second Edition (GARS-2). The GARS-2 is an autism screening tool developed to assist teachers, parents and other people who observe children to identify and diagnose autism [12]. It is a 42-questions form for individuals of ages 3 to 22 years old and divided into 3 subscales which address the definition of autism as stated in the DSM-IV-TR (Diagnostic and Statistical Manual of Mental Disorders: Fourth Edition-Text Revision) and the Autism Society of America.
The items for assessment are categorized like the original GARS-2 into sub-scales of stereotyped behavior, communication and social interaction. Each child will be given scores according to scales of: 0 (never observed), 1 (observed, as in behaving in the respective manner during the module) or 8 (the child does not speak at all during the module). The sub-scale of impairments in communication is assessed using 10 items for evaluation which are:
- Repeats (echos) words verbally or with signs
- Repeats word out of context (repeats words heard 1 minute earlier)
- Repeats words or phrases over and over
- Speaks or signs with flat tone, affect or with dysrhythmic patterns
- Looks away or avoids looking at class teacher when NAO or class teacher is talking or giving instructions
- Uses pronouns inappropriately (refers self to as “he”, “you” or “she”)
- Uses the word “I” inappropriately. (does not say “I” to refer to self)
- Repeats unintelligible words (babbles) over and over
- Uses gestures instead of speech or signs to obtain objects
- Inappropriately answers questions about a statement or brief story (by NAO or class teacher)
Prior to the child-robot pilot study, the children were assessed to determine their IQ level and autism diagnosis. The children’s IQ was determined using the Stanford-Binet Intelligence Scale, Fifth Edition (SB5) standard intelligence test. The diagnose test utilized the ADOS (Autism Diagnostic Observation Schedule) which is considered as the gold standard [13] in diagnostic evaluations for autism. Results from the ADOS test shall indicate whether a child is under the autistic range (classic autism) or the ASD range (the child falls under the autism spectrum but does possess the triad of impairments as in classic autism).
The SB5 and ADOS tests had been carried out by certified psychologists who are trained to carry out the evaluation. This preliminary step is taken as we discovered that there is an obvious dearth in previous studies that relates the children’s IQ level and diagnosis with their response to robotic exposure.
Our early hypothesis is that based on the initial child-robot session, the humanoid robot NAO has the capability to reduce a child’s autistic behavior specifically in the communication subscale compared to a regular class session. We also hypothesize that there is a connection that links a child’s responses to HRI with his or her IQ scores.
The subjects in this study are 4 boys and 1 girl with the mean age of 8.6 years. Prior to the study, we had duly obtained written consent from the parent or guardian for each child in order for them to participate in the study. Details on the children’s age, nonverbal IQ (NVIQ), verbal IG (VIQ), full scale IQ (FSIQ) level and ADOS diagnosis are:-
H. – Age 8.2 years old. NVIQ = 64, VIQ = 46, FSIQ = 52 and diagnosis = Autism
M. – Age 13.3 years old. NVIQ = 56, VIQ = 52, FSIQ = 52 and diagnosis = Autism
A. – Age 6.10 years old. NVIQ = 53, VIQ = 47, FSIQ = 46 and diagnosis = Autism
F. – Age 8.1 years old. NVIQ = 50, VIQ = 52, FSIQ = 48 and diagnosis = Autism
N. – Age 7.4 years old. NVIQ = 50, VIQ = 44, FSIQ = 44 and diagnosis = Autism
Based on the details, it can be summarized that all 5 children have the full scale IQ (FSIQ) of moderately impaired or delayed (defined by IQ range from 40 to 54). Only Q. H. and A. M. have nonverbal IQ (NVIQ) of mildly impaired or delayed while the rest of the scores for NVIQ and VIQ falls under moderately impaired or delayed. Also, all of them have met the ADOS criteria for autism.
3. Results and Discussion
The comprehensive evaluation on the initial response of the children during our pilot study is demonstrated in the remainder of this paper, focusing on the children’s scores in the sub-scale of communication only. At mentioned above, the aim of the study is to observe autistic children of moderately impaired intelligence in terms of communication behaviour when they are exposed to simple human-robot interaction (HRI) modules executed by a humanoid robot NAO.
3.1 Observation and results on communication sub-scale of child-robot interaction versus in-class setting
The pilot study was executed in two different settings. Other than the robot based interaction, the children were also observed in class during regular school hours for the same duration of 14 minutes and 30 seconds. This procedure is done to observe their usual behavior among-st fellow classmates in the presence of their class teacher and without the presence of the robot. Both observation settings are illustrated in Figure 2 below.
(a) |
(b)  |
Fig. 2. Observation on Child N. A. (a) during the single session of HRI and (b) during in-class observation.
Our aim is to study the autistic traits of these children in both situations. Thus, a comparison can be made whether the presence of a robot executing simple HRI modules will elicit or dampen the autistic characteristics of the child with autism in the communication sub-scale. Each child was exposed to the robot for a single session of HRI. The class observation was also done once. Interaction in both settings were recorded and then analyzed for assessment.
The scores for each child (in the communication sub-scale) are converted into percentage value and observation data are compiled. The graph in Figure 3 shows the comparison of autistic traits of communication during child-robot interaction compared to actual class session. The graph depicts that the each child’s score during child-robot interaction are comparatively lower compared to the class observation except for child Q.H. In other words, 4 out of the 5 children exhibited a decrease in autistic behavior (communication sub-scale) when the robot is executing HRI modules during the single session of child-robot interaction. These promising results indicate that the basic modules of interaction together with the appealing appearance of the NAO robot were able to attract the children’s attention, and hence keep each child engaged with the robot during interaction. This ‘engagement’ had resulted with a reduction in autistic behavior of these children compared to their typical environment in class.
Conversely, for child Q. H., the comparison of scores shows that more autistic deficit in communication were observed during the child-robot session, compared to the in-class observation. It is expected that such observation would occur based on the individualized character of each autistic child. Similar results have been presented and discussed in [14] and [15] that show the tremendous variability in the valence of affective response toward a robot by children with Autism Spectrum Disorders (ASD).
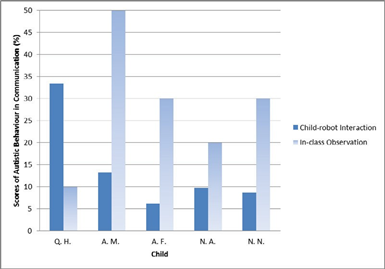 Fig. 3. The graph shows the comparison of scores in communication sub-scale (in percentage), indicating the autistic behavior shown by all 5 children
Fig. 3. The graph shows the comparison of scores in communication sub-scale (in percentage), indicating the autistic behavior shown by all 5 children
3.2 Results on each child’s FSIQ versus scores in communication subscale of child-robot interaction versus in-class setting
The association between the Full Scale IQ (FSIQ) of the children with their respective scores of communication behavior is also explored. Figure 4 shows relationship between these two measurable parameters.
From the graph, it can be deducted that autistic children with FSIQ of moderately impaired (from 40-54) are receptive to robot-based intervention. This is again showed by the lower autistic traits observed during the HRI modules compared to in- class setting. With exception to the child Q. H., the pattern of scores showed by the other 4 children give promising possibilities to the utilization of the humanoid robot NAO in HRI procedures for autistic children.
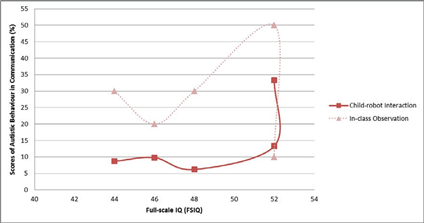
Fig. 4. The graph illustrates the trend associating the Full Scale IQ (FSIQ) of the 5 autistic children with their scores in communication sub-scale
4. Conclusion
This paper reports and discusses the results from a preliminary study involving 5 autistic children aged between 7 to 13 years old studying at the National Autism Society of Malaysia (NASOM). The goal is to observe and contrast the autistic characteristics of the child with autism in the communication sub-scale for two different set-ups; during child-robot interaction and in the typical classroom environment.
As a whole, results from this study suggest that the presence of NAO robot during interaction is able to relatively decrease the autistic behavior of the autistic children in the communication sub-scale. Even though the scores of child Q. H. showed the complete opposite, this case may be considered as the outlier in this study. Q. H. scores show a different pattern compared to the other 4 children. For child Q. H., the evidence puts forward the possibility that a repetitive exposure of HRI by NAO is needed in order for the interaction to be able to dampen the communication deficit in him. This also supports the relation of the child’s responses to the highly individualized autistic character of each child. Nevertheless, with 4 out of the 5 children showing positive communication responses to the NAO robot, this study is indicative that the simple HRI modules by the robot are able to lessen the autistic behavior of the children with autistic disorders.
Another point of suggestion is with regards to the children’s FSIQ scores. All 5 subjects in this study have FSIQ level of between 44 to 52; which fall under the category of moderately impaired. This particular group of autistic children oftentimes has trouble in expressing and interpreting emotions which make communication difficult. 4 out of the 5 children in this IQ range show good response to the presence of NAO robot during interaction. More exposure to NAO, with specific HRI modules targeting at communication behavior and done with more autistic children in the same FSIQ range will further establish a solid connection between the response these children and their respective FSIQ level.
To wrap up, due to the fact that this study uses a very small sample size (of n = 5), the results may not be considered to be conclusive outcomes. We do acknowledge the fact that the work presented in this study is very much in the pilot stage. Nevertheless, the findings obtained are crucial for us to form a concrete foundation and proof on the positive utilization of the humanoid robot NAO for the children affected by autism. Though still at its infancy stage but such effort does give these children a beacon of hope that the society do support and care for them and embraces them as part of our lives.
Acknowledgements
The authors gratefully acknowledge the Ministry of Higher Education Malaysia (MOHE), Universiti Teknikal Malaysia Melaka (UTeM), Universiti Teknologi MARA (UiTM) Shah Alam, Selangor and The National Autism Society of Malaysia (NASOM) for their support. A part of this project is supported by the Ministry of Higher Education Malaysia (MOHE) under the Fundamental Research Grant Scheme (FRGS) (600-RMI/FRGS 5/3/Fst/ (31/2011)).
References
- A. Weinberg, "Intelligence and IQ: Landmark issues and great debates.," American Psychologist, vol. Vol 44(2), pp. 98-104, 1989.
- Charman, A. Pickles, E. Simonoff, S. Chandler, T. Loucas, and G. Baird, "IQ in children with autism spectrum disorders: da ta from the Special Needs and Autism Project (SNAP)," Psychological Medicine, vol. 41(3), pp. 619-627, Mar 20122.
- P. Association and A. P. A. T. F. o. DSM-IV., Diagnostic and statistical manual of mental disorders: DSM-IV-TR: American Psychiatric Publishing, Inc., 2000.
- L. Gabriels, M. L. Cuccaro, D. E. Hill, B. J. Ivers, and E. Goldson, "Repetitive behaviors in autism: relationships with associated clinical features," Research in Developmental Disabilities, vol. 26, pp. 169-181, 2005.
- Ben-Itzchak and D. A. Zachor, "The effects of intellectual functioning and autism severity on outcome of early behavioral intervention for children with autism," Research in Developmental Disabilities, vol. 28, pp. 287-303, 2007.
- Eikeseth, T. Smith, E. Jahr, and S. Eldevik, "Outcome for Children with Autism who Began Intensive Behavioral Treatment Between Ages 4 and 7," Behavior Modification, vol. 31, pp. 264-278, May 1, 2007 2007.
- Werry and K. Dautenhahn, "Applying Mobile Robot Technology to the Rehabilitation of Autistic Children," in SIRS’99, Symposium on Intelligent Robotics Systems, Coimbra, Portugal, 1999.
- Conti, S. Lovern, and A. Reynolds. (2012, 12th June 2012). ‘Communication deficit’ Effort to raise autism awareness under way. The OBSERVER. Available: http://www.observertoday.com/page/content.detail/id/571153/-Communication-deficit-.htmlhttp://www.observertoday.com
- Kozima, C. Nakagawa, and Y. Yasuda, "Interactive robots for communication-care: A case-study in autism therapy," 2005, pp. 341-346. [10] D. J. Ricks and M. B. Colton, "Trends and considerations in robot-assisted autism therapy," 2010, pp. 4354-4359. [11] S. Shamsuddin, H. Yussof, L. Ismail, F. A. Hanapiah, S. Mohamed, H. A. Piah, and N. I. Zahari, "Initial response of autistic children in human-robot interaction therapy with humanoid robot NAO," in Signal Processing and its Applications (CSPA), 2012 IEEE 8th International Colloquium on, 2012, pp. 188-193. [12] UVM. (2012, 30th May 2012). GARS-2 training module. [Learning module]. Available: http://www.uvm.edu/ [13] G. Conti-Ramsden, Z. Simkin, and N. Botting, "The prevalence of autistic spectrum disorder s in adolescents with a history of specific language impairment (SLI)," Journal of Child Psychology and Psychiatry, vol. 47, pp. 621-628, 2006. [14] D. Feil-Seifer and M. Mataric, "Automated detection and classification of positive vs. negative robot interactions with children with autism using distance-based features," 2011, pp. 323-330. [15] D. Feil-Seifer and M. Matarić, "Toward socially assistive robotics for augmenting interventions for children with autism spectrum disorders," 2009, pp. 201-210.
© 2012 The Authors. Published by Elsevier Ltd. Selection and/or peer-review under responsibility of the Centre of Humanoid Robots and Bio-Sensor (HuRoBs), Faculty of Mechanical Engineering, Universiti Teknologi MARA. Open access under CC BY-NC-ND license.
Ready to get started with your robot? click below to get get a free estimate, without any commitment"








.webp?width=124&height=124&name=image%20(1).webp)
.webp?width=169&height=87&name=image%20(2).webp)









